Spidar: robots japoneses con forma de araña
Investigadores de la Universidad de Tokio han inventado un robot con forma de araña que puede volar y gatear. El SPD1 podría ingresar al mercado en abril de 2024, con otras versiones que tengan la capacidad de realizar reparaciones menores además de sus funciones de monitoreo y examen existentes.
Por Hermes Lavallén
Las arañas han sido de inspiración para estos dispositivos que por ahora están confinados en laboratorios y universidades. Citamos algunos de los últimos desarrollos japoneses:
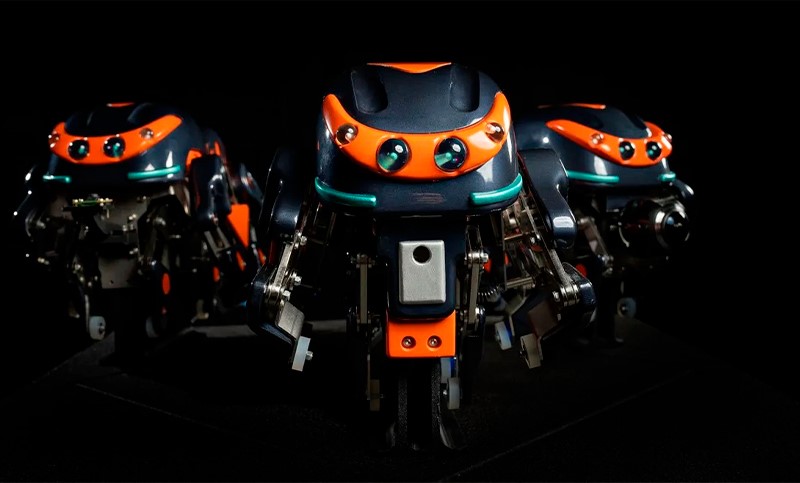
El SPD1, un robot con forma de araña. Una empresa de robótica japonesa ha creado robots para analizar y desinfectar el sistema de drenaje del país. SPD1 funciona en sincronización con varios robots, sirve como una «solución eficiente para la escasez crónica de mano de obra y el trabajo de inspección de aguas residuales», según tmusk, una empresa de soluciones robóticas.
Hay escasez de mano de obra para inspeccionar tuberías, y la cantidad de tuberías de alcantarillado que no han sido inspeccionadas está aumentando. Según una traducción aproximada de una publicación de la compañía el mes pasado, el prototipo de múltiples patas SPD1, un robot andante, se desarrolló a pedido de una empresa de mantenimiento de carreteras y tuberías de alcantarillado para ayudar a mejorar la eficiencia del trabajo de inspección de alcantarillado.
La empresa afirma que todos los robots para sondeo de tuberías móviles fabricados en Japón son un nuevo intento de abordar la amplia gama de necesidades que se prevé que seguirán creciendo en el futuro.
El país, que se considera que tiene un comportamiento excepcionalmente disciplinado, necesitaba soluciones innovadoras para hacer frente al deterioro de las líneas de alcantarillado que se ha estado desarrollando desde la década de 1970.
El dispositivo, que actualmente tiene un tamaño de 21 x 25 x 28 centímetros (8,3 x 9,8 x 11 pulgadas) y pesa aproximadamente 3,5 kilogramos, está diseñado para pasar a través de tuberías que son demasiado pequeñas para que los humanos las exploren. Una conexión que va desde el robot hasta su operador humano, que usa un controlador de juego, permite la alimentación y el control remoto del robot.
El operador ve video en vivo desde la cámara integrada del SPD1, que puede ser un Módulo de cámara 2 de Raspberry Pi o una cámara de 360 grados XDV360.
El usuario puede girar e inclinar su pantalla táctil en lugar de girar e inclinar físicamente la cámara real.
El robot emplea sensores y focos LED, a los que se refiere como sus «ojos de araña», para escanear su entorno.
Las primeras versiones del SPD1 usaban ruedas para moverse.
Sin embargo, la topografía irregular y rocosa de los sistemas de alcantarillado rápidamente demostró ser demasiado desafiante.
Durante las pruebas, las ocho patas que se usaron en lugar de la disposición de las ruedas dieron a las máquinas controladas a distancia mucha más movilidad y alcance.
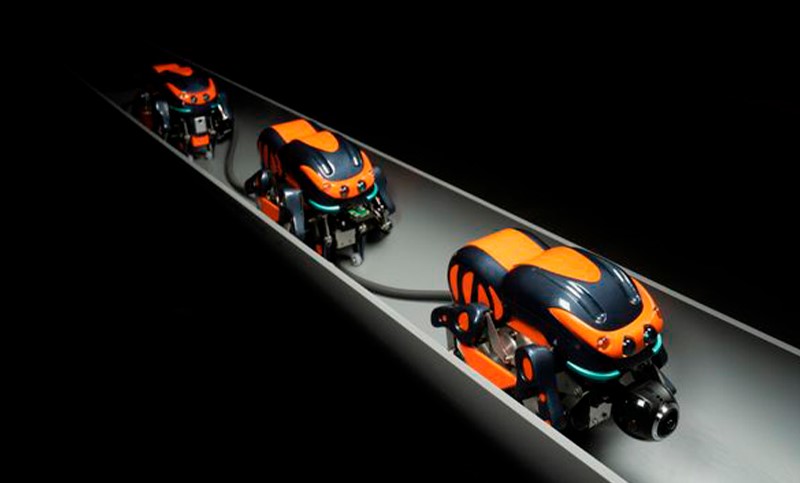
Si bien SPD1 puede usarse únicamente para inspecciones, tmusk también ve a tres de los robots conectados físicamente entre sí por una correa y operan como un equipo, superando varios desafíos.
En sincronía, el primer robot exploraría la tubería, el segundo detectaría las partes que necesitaban reparación y el tercer bot manejaría la reparación con un brazo robótico que contiene una herramienta, según la firma.
Después de una demostración de «sitio de inspección de tuberías de aguas residuales», tmsuk tiene la intención de anunciar la disponibilidad comercial del producto.
La firma anticipa que el SPD1 podría ingresar al mercado en abril de 2024, con otras versiones que tengan la capacidad de realizar reparaciones menores además de sus funciones de monitoreo y examen existentes.
The SPIDAR robot volador con forma de araña
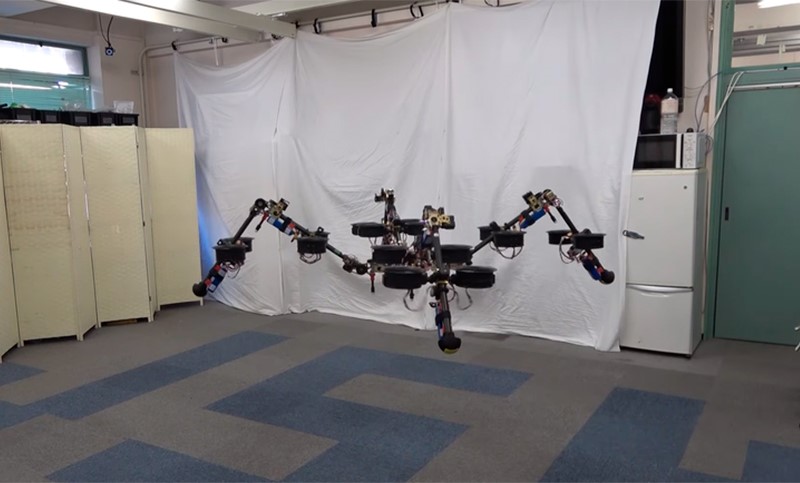
Investigadores de la Universidad de Tokio han ideado un robot con forma de araña que puede volar y gatear. El robot SPIDAR es un «Robot cuadrúpedo anfibio aire-tierra asistido por rotores esféricos vectoriales y distribuidos».
Este robot recuerda a los Spider Drones que se vieron en el videojuego Fallout 3 y emplea la potencia de servomotores livianos. Además, pesa unos 15 kilogramos pero sus extremidades no le permiten sostenerse por sí solo. De hecho, esta ligereza le permite a SPIDAR lograr un ascenso sin un motor a reacción. Esto significa que el robot araña necesita tener un rebote constante para mantenerse erguido.
Los movimientos de las piernas del robot están controlados por 16 propulsores, cuatro en cada pierna que se pueden usar para mover las piernas del robot. Cuando la alineación es óptima, este robot puede ponerse de pie y caminar, aunque en este momento es bastante lento.
Cuando sus propulsores miran hacia abajo, puede despegar para volar durante unos 9 minutos antes de que se agoten las baterías. Al caminar, sus baterías duran 18 minutos.
Para el valor de uso del mundo real, necesitaría mucha más potencia. Por ahora, SPIDAR es un prototipo. Para este robot exacto, podría haber muchas aplicaciones dentro del factor de forma de dron.